Lecture Slides
I have created various slide decks during my Ph.D. to create training material for our lab group.
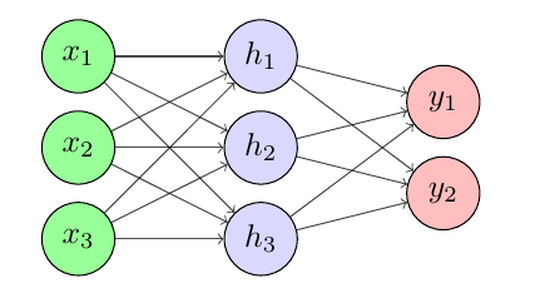
Neural Networks
Core tool in deep learning. Credit is given to Jonathan Arsenault and Vassili Korotkin for helping me make these.